- Sectores
- Aeroespacio y defensa
- Industria de la ciencia
- Fintech
- Sobre ARQUIMEA
- Actualidad
ANDRA es la agencia francesa responsable de garantizar la gestión y eliminación seguras de los residuos radioactivos para proteger a las generaciones presentes y futuras de los riesgos inherentes a dichas sustancias. ANDRA supervisa el proyecto Cigèo (Centro Industrial de Almacenamiento Geológico), que consiste en una instalación geológica profunda destinada a la eliminación de residuos altamente radioactivos de larga duración. En este contexto, se construyó el Laboratorio Subterráneo de Bure como un medio excepcional para llevar a cabo las actividades de investigación necesarias para la implantación de Cigèo.
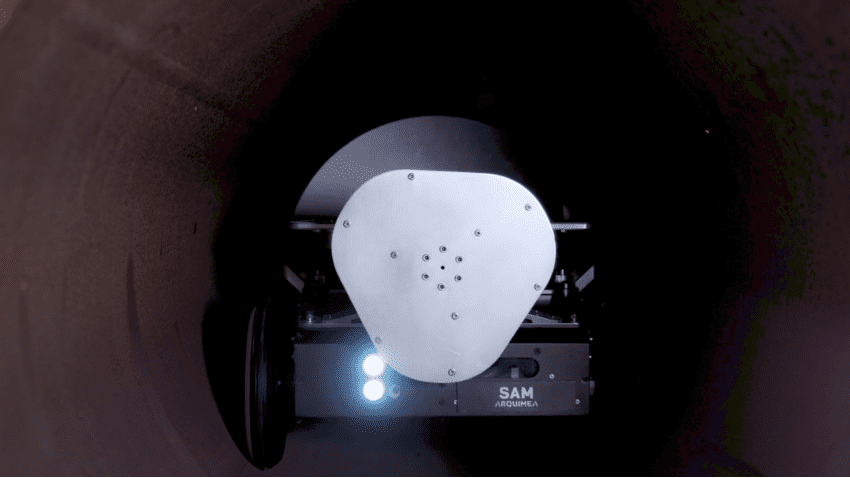
El SAM (del francés Systèm d’Auscultation Mobile pour l’alvéole AHA) es un robot de alta precisión que realiza distintos tipos de mediciones dentro de las cubiertas de las celdas de almacenamiento de Alto Nivel (HL, por sus siglas en inglés). Las celdas de almacenamiento HL son microtúneles de al menos 80 m de largo y un diámetro interno de aproximadamente 0,7 m en las que se colocan los paquetes de residuos. El SAM se utilizará en una serie de experimentos subterráneos para producir una celda prototipo y estudiar su comportamiento.
El SAM se mueve a través de la tubería y comprueba la consistencia de los valores de los dispositivos de medición de la «cubierta exterior». Estas actividades se repetirán en varias campañas para hacer un seguimiento de la forma en que los parámetros cambian con el tiempo.
El SAM puede medir con alta precisión su propia posición en la celda de almacenamiento longitudinalmente, así como en el alabeo y cabeceo, la geometría de la cubierta mediante el análisis de la ovalización de la parte interna de la tubería y las condiciones atmosféricas ambientales. Además, es ajustable para poder albergar sistemas adicionales de medición.
ANDRA buscaba un sistema autónomo con alta precisión en las mediciones y necesidades de mantenimiento bajas. Los elementos siguientes fueron cruciales para garantizar el éxito del proyecto:
El SAM se ha diseñado para obtener datos de alta precisión de la medición de la deformación de tubos de hasta 150 m de longitud y desde 610 hasta 710 mm de diámetro en posición horizontal (±1o). Algunos de los aspectos que cabe destacar son los siguientes:

Cada subcomponente del sistema ha sido probado y validado por ANDRA en la etapa de inspección final ante de su entrega.
Hasta ahora, se ha llevado a cabo un ensayo en el laboratorio subterráneo de Bure en julio de 2019. El SAM respondió positivamente dentro de las especificaciones del experimento, cuyo objetivo era determinar el punto de referencia de una celda HL. Pronto tendrán lugar más campañas de ANDRA para hacer seguimiento de la evolución de los parámetros en la misma celda.
El SAM se utilizará como base común para la medición y el seguimiento de las celdas AHA que se construirán en el Laboratorio Subterráneo de Bure de entre 0 a 150 m de longitud, pero que podrán ampliarse fácilmente a mayores distancias. El SAM demostró cómo puede obtenerse un alto nivel de personalización mediante el uso de las plataformas móviles estándar con tiempos de desarrollo cortos. El sistema resultante está diseñado de cara a una futura producción asequible de varias unidades y a unos plazos de producción cortos.